In this lecture we will cover:
1. Primal Optimization Problem
Example of a Primal Problem (Convex Optimization Form) $$ \min_{x} \quad f(x) $$ $$ \text{subject to } g_i(x) \leq 0, \quad i = 1, ..., m $$ $$ h_j(x) = 0, \quad j = 1, ..., p $$ where:
2. Dual Optimization Problem
We construct the Lagrangian function: $$ L(x, \lambda, \nu) = f(x) + \sum_{i=1}^{m} \lambda_i g_i(x) + \sum_{j=1}^{p} \nu_j h_j(x) $$ where:
The dual function is: $$ \theta(\lambda, \nu) = \inf_x L(x, \lambda, \nu) $$ Then, the dual optimization problem is: $$ \max_{\lambda \geq 0, \nu} \theta(\lambda, \nu) $$
We don't need to know about dual optimization in this course
The problem more generally: $$ \min_{x} \quad f(x) $$ $$ \text{subject to } g_i(x) \leq 0, \quad i = 1, ..., m $$
Solution: Solution $x^*$ has smallest value $f_0(w^*)$ amon gall the values that satisfythe constraints.
Questions:
Understanding the Convexity Inequality
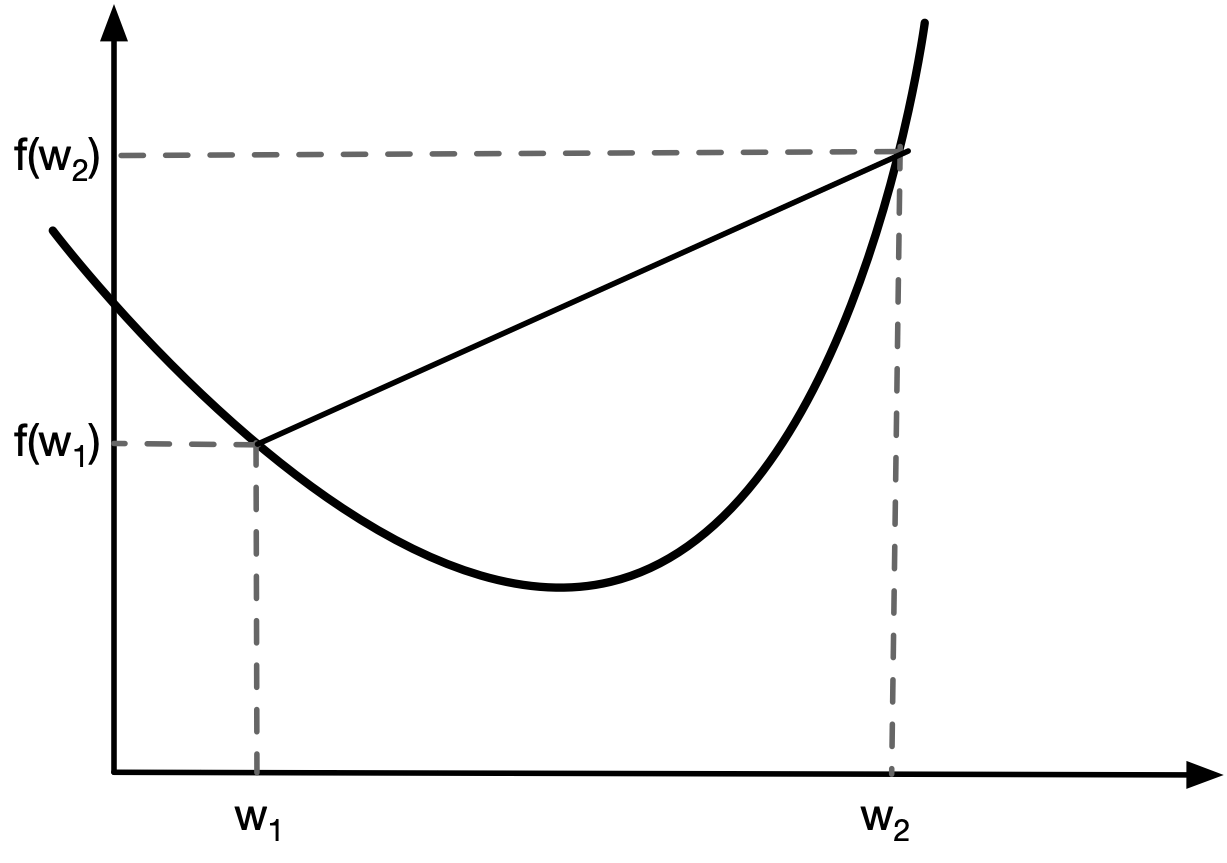
A convex function is a function where the line segment between any two points on its graph lies above or on the graph of the function. This property ensures that the function does not have "dips" or "valleys" beyond what is expected from a convex shape.
Mathematical Definition
A function $ f: \mathbb{R}^n \to \mathbb{R} $ is convex if, for all points $ x, y \in \mathbb{R}^n $ and for all $ \lambda \in [0,1] $, the following inequality holds:
$$ f(\lambda x + (1-\lambda) y) \leq \lambda f(x) + (1-\lambda) f(y) $$This condition means that for any two points $ x $ and $ y $, the function evaluated at any convex combination of these points is less than or equal to the corresponding convex combination of function values.
Examples of Convex Functions
Operations Which Preserve Convexity
Non-negative weighted sums: $ \alpha_i \geq 0 $; if $ f_i $ are convex for all $ i $, then so is:
$$ g = \alpha_1 f_1 + \alpha_2 f_2 + \dots $$
Composition with an affine mapping: If $ f $ is convex, then so is:
$$ g(\mathbf{w}) = f(A\mathbf{w} + b) $$
Pointwise maximum: If $ f_1, f_2 $ are convex, then so is:
$$ g(\mathbf{w}) = \max \{ f_1(\mathbf{w}), f_2(\mathbf{w}) \} $$
Why is convexity important?
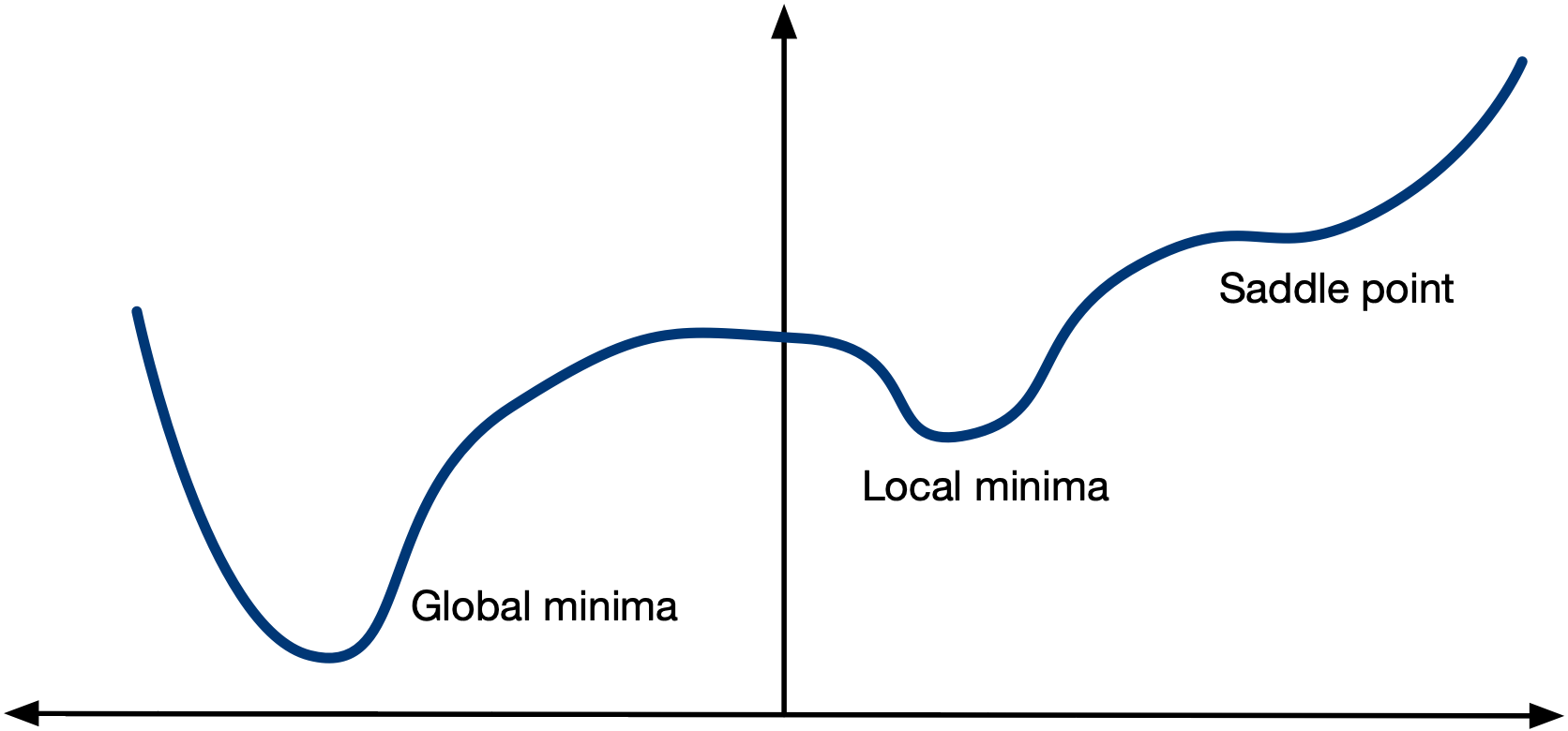
Global Optimality Guarantee If a function is convex, any local minimum is also a global minimum. This is a crucial property because, in general, non-convex functions may have multiple local minima, making it difficult to find the best solution. Formally, for a convex function $ f(x) $, if $ x^* $ satisfies:
$$ \nabla f(x^*) = 0 $$
then $ x^* $ is a global minimum.
Efficient Algorithms for Convex Problems Convex optimization problems can often be solved efficiently using well-established algorithms, including:
Simplex and Interior-Point Methods (for convex Linear Programming problems)
These algorithms are guaranteed to converge to the global minimum under appropriate conditions.
Iterative Algorithm
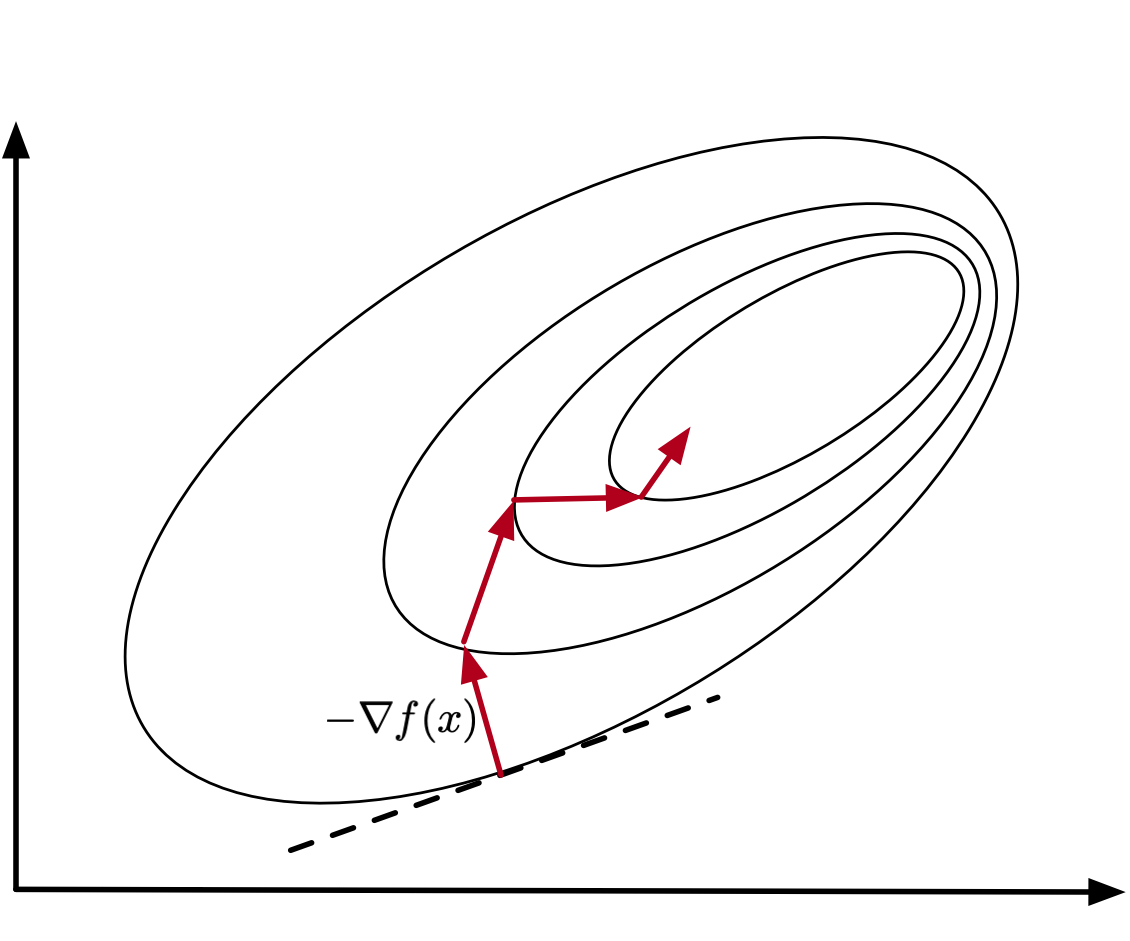
Descent Direction
The descent direction $ d_k $ satisfies:
$$ \nabla f(\mathbf{w})^\top d_k < 0 $$How to select direction $d_k$
Other directions also used:
How to Select Stepsize
Exact:
$$ \alpha_k = \arg \min_{\alpha \geq 0} f(\mathbf{w}_k + \alpha d_k) $$
Constant:
$$ \alpha_k = \mathbb{R} $$
Steepest descent + constant step size is gradient descent!
So what's the problem? Can we call the lecture over? Interactive web tool
How to Select Stepsize (continued)
Optimal line search At every iteration $k$, optimal line search computes the step size $ \varepsilon_k $ as follows:
$$ \varepsilon_k = \arg \min_{\varepsilon \geq 0} f(\mathbf{x}_k + \varepsilon d_k). \tag{3.3} $$Clearly, the above problem presumes a chosen direction of motion $ d_k $. The method searches for the value of $ \varepsilon_k $ over the half-line $ [0, \infty) $, therefore it is called optimal line search.
By this description, it is clear that optimal line search corresponds to a sequence of optimal local decisions, yielding maximum reduction of $ f $ at every iteration $ k $, given that the current state or position is $ \mathbf{x}_k $ and the descent direction has been chosen to be $ d_k $.
Solving for $ \varepsilon $ at every iteration of the gradient or steepest descent algorithms may be difficult and costly.
This motivates the Armijo rule. [1]
Armijo’s Rule in Machine Learning
Armijo’s rule is a step size selection method used in gradient-based optimization to ensure sufficient decrease in the objective function while maintaining stability. It is widely used in line search methods for optimization, particularly in gradient descent, Newton’s method, and quasi-Newton methods.
Armijo’s Rule for Step Size Selection Armijo’s rule uses a backtracking approach to find a suitable step size $ \alpha $:
Check if the Armijo condition holds:
$$ f(\mathbf{w}_k + \alpha d_k) - f(\mathbf{w}_k) \leq \sigma \alpha \nabla f(\mathbf{w}_k)^T d_k $$
If the condition does not hold, reduce $ \alpha $ using a decay factor $ \beta $:
$$ \alpha = \beta \alpha, \quad \text{(e.g., with } \beta = 0.5) $$
Repeat until a suitable $ \alpha $ is found.
Armijo’s Condition The Armijo condition ensures that the function value decreases sufficiently after taking a step in the descent direction. Given an objective function $ f(\mathbf{w}) $, the step size $ \alpha $ must satisfy:
$$ f(\mathbf{w}_k + \alpha d_k) - f(\mathbf{w}_k) \leq \sigma \alpha \nabla f(\mathbf{w}_k)^T d_k $$where:
This condition ensures that:
Bounds the decrease: The right-hand side, $ \sigma \alpha \nabla f(\mathbf{w}_k)^T d_k $, represents a fraction of the expected decrease based on the first-order Taylor approximation:
$$ f(\mathbf{w}_k + \alpha d_k) \approx f(\mathbf{w}_k) + \alpha \nabla f(\mathbf{w}_k)^T d_k $$
The condition ensures that the actual decrease is at least a fraction ( \sigma ) of the predicted decrease.
Using a smart step size helps stabalize gradient descent (and make things faster too!) Interactive web tool
One problem with gradient descent is that it has no memory.
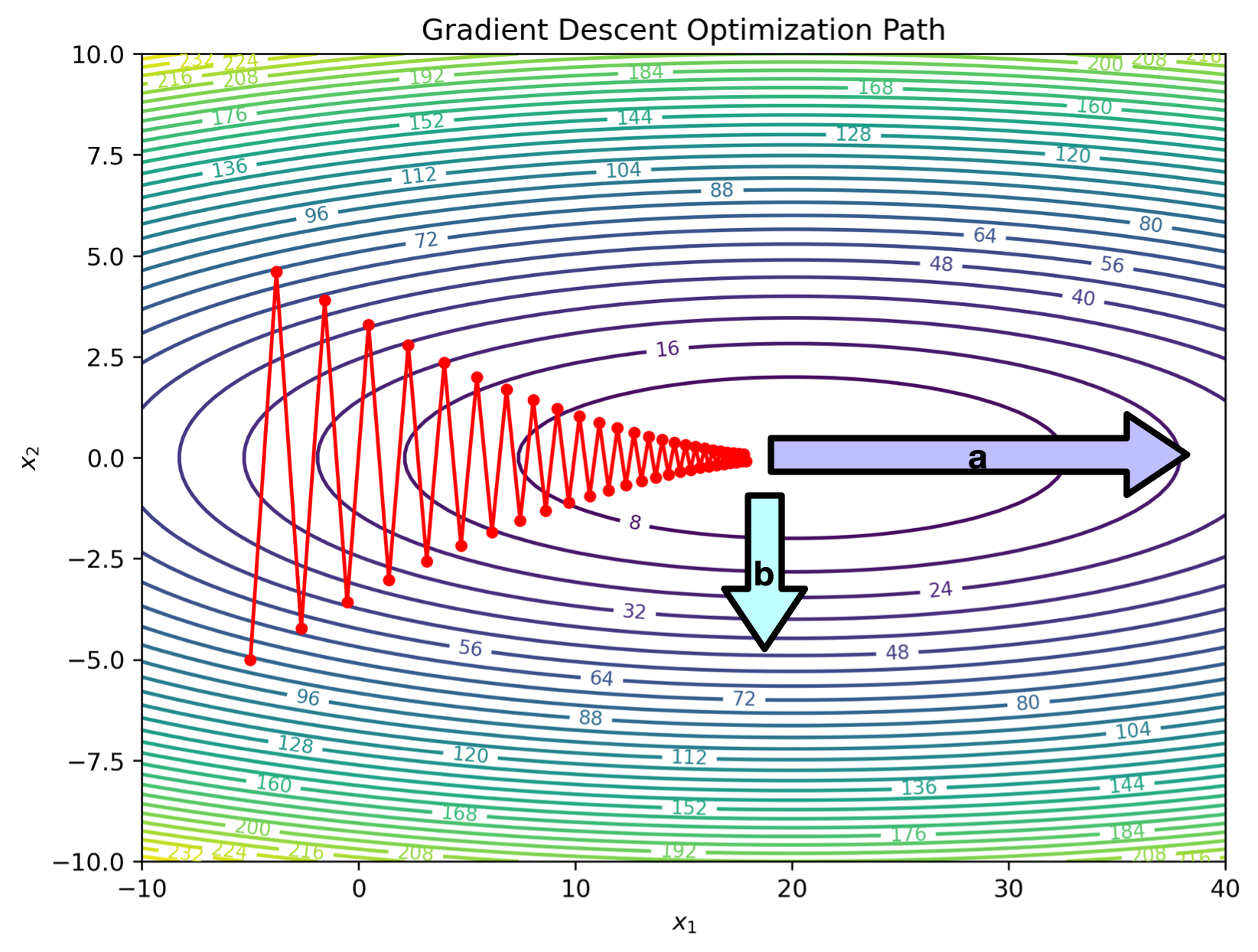
The ratio between the length of the longest and shortest principle axes of this ellipse is known as the condition number:
$$\kappa = \left(\frac{a}{b}\right)^2$$In order to get within $\epsilon$ of a minima, we need $\geq \kappa \log\left(\frac{1}{\epsilon}\right)$ iterations Gradient Descent Condition Number Dependence
import torch
import numpy as np
import matplotlib.pyplot as plt
# Define the loss function f(x1, x2) = (x1 - 20)^2 / 20 + 2 * x2^2
def loss_function(x):
return (x[0] - 20) ** 2 / 20 + 2 * x[1] ** 2
# Gradient of the loss function
def compute_gradient(x):
grad_x1 = 2 * (x[0] - 20) / 20
grad_x2 = 2 * 2 * x[1]
return torch.tensor([grad_x1, grad_x2])
# Optimization settings
learning_rate = 0.48
iterations = 50
# Initial point
x_gd = torch.tensor([-5.0, -5.0])
# Store trajectory for plotting
gd_trajectory = [x_gd.numpy()]
# Perform optimization
for _ in range(iterations):
grad_gd = compute_gradient(x_gd)
x_gd = x_gd - learning_rate * grad_gd
gd_trajectory.append(x_gd.numpy())
# Convert trajectory to NumPy for plotting
gd_trajectory = np.array(gd_trajectory)
# Create meshgrid for contour plot
x1_vals = np.linspace(-10, 40, 100)
x2_vals = np.linspace(-10, 10, 100)
X1, X2 = np.meshgrid(x1_vals, x2_vals)
Z = loss_function([X1, X2])
# Create figure and contour plot
fig, ax = plt.subplots(figsize=(8, 6))
contour = ax.contour(X1, X2, Z, levels=30, cmap='viridis')
ax.clabel(contour, inline=True, fontsize=8)
# Plot Gradient Descent trajectory
ax.plot(gd_trajectory[:, 0], gd_trajectory[:, 1], 'r-o', markersize=4, label="Gradient Descent")
# Labels and title
ax.set_xlabel('$x_1$')
ax.set_ylabel('$x_2$')
ax.set_title('Gradient Descent Optimization Path')
#ax.legend()
# Save the plot as an image file
image_filename = "./img/gradient_descent.png"
plt.savefig(image_filename, dpi=300, bbox_inches='tight')
# Show the plot
plt.show()

Gradient Descent with Momentum is an optimization algorithm that improves standard gradient descent by accelerating convergence and reducing oscillations, especially in highly curved loss landscapes.
Update Rule for Gradient Descent with Momentum In standard gradient descent, the update rule is:
$$ \mathbf{w}_{k+1} = \mathbf{w}_k - \alpha \nabla f(\mathbf{w}_k) $$In gradient descent with momentum, we introduce a velocity term ( v_k ):
Compute the velocity (momentum update): $$ v_{k+1} = \beta v_k - \alpha \nabla f(\mathbf{w}_k) $$
Update weights using velocity: $$ \mathbf{w}_{k+1} = \mathbf{w}_k + v_{k+1} $$
where:
Intuition Behind Momentum
Momentum Helps By:
import torch
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
# Define the loss function f(x1, x2) = (x1 - 10)^2 / 20 + x2^2
def loss_function(x):
return (x[0] - 20) ** 2 / 20 + 2 * x[1] ** 2
# Gradient of the loss function
def compute_gradient(x):
grad_x1 = 2 * (x[0] - 20) / 20
grad_x2 = 2 * 2 * x[1] ** 1
return torch.tensor([grad_x1, grad_x2])
# Optimization settings
learning_rate = 0.2
momentum = 0.9
iterations = 50
# Initial point (starting from a far-off place)
x_gd = torch.tensor([-5.0, -5.0])
x_gdm = torch.tensor([-5.0, -5.0])
# Lists to store trajectory for plotting
gd_trajectory = [x_gd.detach().numpy()]
gdm_trajectory = [x_gdm.detach().numpy()]
# Momentum velocity term
velocity = torch.tensor([0.0, 0.0])
# Perform optimization
for _ in range(iterations):
# Compute gradients
grad_gd = compute_gradient(x_gd)
grad_gdm = compute_gradient(x_gdm)
# Normal Gradient Descent Update
x_gd = x_gd - learning_rate * grad_gd
gd_trajectory.append(x_gd.numpy())
# Gradient Descent with Momentum Update
velocity = momentum * velocity - learning_rate * grad_gdm
x_gdm = x_gdm + velocity
gdm_trajectory.append(x_gdm.numpy())
# Convert trajectories to NumPy for plotting
gd_trajectory = np.array(gd_trajectory)
gdm_trajectory = np.array(gdm_trajectory)
# Create a meshgrid for 3D surface plot
x1_vals = np.linspace(-10, 40, 100)
x2_vals = np.linspace(-10, 10, 100)
X1, X2 = np.meshgrid(x1_vals, x2_vals)
Z = loss_function([X1,X2])
# Plot the function surface and optimization paths
fig = plt.figure(figsize=(12, 8))
# 3D surface plot
ax = fig.add_subplot(111, projection='3d')
ax.plot_surface(X1, X2, Z, cmap='viridis', alpha=0.7)
# Plot GD trajectory
ax.plot(gd_trajectory[:, 0], gd_trajectory[:, 1], color='red', marker='o', markersize=4, label='Gradient Descent')
# Plot GDM trajectory
ax.plot(gdm_trajectory[:, 0], gdm_trajectory[:, 1], color='blue', marker='o', markersize=4, label='Momentum Gradient Descent')
# Labels and legend
ax.set_xlabel('$x_1$')
ax.set_ylabel('$x_2$')
ax.set_zlabel('Loss')
ax.set_title('Gradient Descent vs Momentum Gradient Descent')
ax.legend()
# 2D Contour plot projection
ax.contour(X1, X2, Z, levels=20, cmap='gray', zdir='z', offset=np.min(Z))
plt.show()

import torch
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
import matplotlib.animation as animation
# Define the loss function f(x1, x2) = (x1 - 20)^2 / 20 + 2 * x2^2
def loss_function(x):
return (x[0] - 20) ** 2 / 20 + 2 * x[1] ** 2
# Gradient of the loss function
def compute_gradient(x):
grad_x1 = 2 * (x[0] - 20) / 20
grad_x2 = 2 * 2 * x[1]
return torch.tensor([grad_x1, grad_x2])
# Optimization settings
learning_rate = 0.5
momentum = 0.9
iterations = 50
# Initial points
x_gd = torch.tensor([-5.0, -5.0])
x_gdm = torch.tensor([-5.0, -5.0])
# Lists to store trajectory for plotting
gd_trajectory = [x_gd.numpy()]
gdm_trajectory = [x_gdm.numpy()]
# Momentum velocity term
velocity = torch.tensor([0.0, 0.0])
# Perform optimization
for _ in range(iterations):
grad_gd = compute_gradient(x_gd)
grad_gdm = compute_gradient(x_gdm)
# Normal Gradient Descent Update
x_gd = x_gd - learning_rate * grad_gd
gd_trajectory.append(x_gd.numpy())
# Gradient Descent with Momentum Update
velocity = momentum * velocity - learning_rate * grad_gdm
x_gdm = x_gdm + velocity
gdm_trajectory.append(x_gdm.numpy())
# Convert trajectories to NumPy for plotting
gd_trajectory = np.array(gd_trajectory)
gdm_trajectory = np.array(gdm_trajectory)
# Create meshgrid for surface and contour plots
x1_vals = np.linspace(-10, 40, 100)
x2_vals = np.linspace(-10, 10, 100)
X1, X2 = np.meshgrid(x1_vals, x2_vals)
Z = loss_function([X1, X2])
# Create figure and subplots
fig = plt.figure(figsize=(12, 8))
# 3D surface plot
ax3d = fig.add_subplot(121, projection='3d')
ax3d.plot_surface(X1, X2, Z, cmap='viridis', alpha=0.7)
# 2D contour plot
ax2d = fig.add_subplot(122)
contour = ax2d.contour(X1, X2, Z, levels=30, cmap='viridis')
ax2d.clabel(contour, inline=True, fontsize=8)
# Initialize points for animation
gd_point_3d, = ax3d.plot([], [], [], 'ro', markersize=8, label="Gradient Descent")
gdm_point_3d, = ax3d.plot([], [], [], 'bo', markersize=8, label="Momentum GD")
gd_point_2d, = ax2d.plot([], [], 'ro', markersize=8)
gdm_point_2d, = ax2d.plot([], [], 'bo', markersize=8)
# Plot initial trajectories
gd_traj_2d, = ax2d.plot([], [], 'r-', alpha=0.5)
gdm_traj_2d, = ax2d.plot([], [], 'b-', alpha=0.5)
# Labels and legends
ax3d.set_xlabel('$x_1$')
ax3d.set_ylabel('$x_2$')
ax3d.set_zlabel('Loss')
ax3d.set_title('Gradient Descent vs Momentum (3D Surface)')
ax3d.legend()
ax2d.set_xlabel('$x_1$')
ax2d.set_ylabel('$x_2$')
ax2d.set_title('Optimization Path on Contour')
def update(frame):
if frame < len(gd_trajectory):
# Update ball positions (must pass lists or arrays, not scalars)
gd_point_3d.set_data([gd_trajectory[frame, 0]], [gd_trajectory[frame, 1]])
gd_point_3d.set_3d_properties([loss_function(gd_trajectory[frame])])
gdm_point_3d.set_data([gdm_trajectory[frame, 0]], [gdm_trajectory[frame, 1]])
gdm_point_3d.set_3d_properties([loss_function(gdm_trajectory[frame])])
gd_point_2d.set_data([gd_trajectory[frame, 0]], [gd_trajectory[frame, 1]])
gdm_point_2d.set_data([gdm_trajectory[frame, 0]], [gdm_trajectory[frame, 1]])
# Update trajectory lines on contour plot
gd_traj_2d.set_data(gd_trajectory[:frame+1, 0], gd_trajectory[:frame+1, 1])
gdm_traj_2d.set_data(gdm_trajectory[:frame+1, 0], gdm_trajectory[:frame+1, 1])
return gd_point_3d, gdm_point_3d, gd_point_2d, gdm_point_2d, gd_traj_2d, gdm_traj_2d
# Create and save animation
ani = animation.FuncAnimation(fig, update, frames=iterations, interval=150, blit=True)
# Save the animation as a GIF file
gif_filename = "./img/gradient_vs_momentum.gif"
ani.save(gif_filename, writer=animation.PillowWriter(fps=10))
print(f"Animation saved as {gif_filename}")
Animation saved as ./img/gradient_vs_momentum.gif

We'll discuss linear regression next time